Souhrn
V průběhu několika posledních let je možno pozorovat častější výskyt hydrologických extrémů. Dochází k častějšímu výskytu povodní a k prohlubování období sucha. Reálně je možné, že v případě po sobě opakujícího se výskytu několika déletrvajících období sucha může dojít k ohrožení zásobní funkce některých vodních zdrojů. Současný stav řízení zásobní funkce je dostačující, ale vzhledem ke klimatickému vývoji může být v blízké době nepostačující. Běžně používaný způsob řízení by mohl být rozšířen o inteligentní způsob řízení vycházející z principu adaptivity. Úspěšnost inteligentního řízení zásobní funkce byla již dříve prokázána. Předložený článek ověřuje vliv polohy nádrže v povodí při inteligentním (adaptivním) řízení zásobní funkce nádrže. Adaptivní řízení používá hydrologických předpovědí přítoků vody do nádrže v kombinaci s optimalizačním modelem. V článku uvedené výsledky poukazují na skutečnost, že je možno za určitých okolností úspěšně použít adaptivní řízení u nádrží situovaných v horní a i v dolní části povodí.

Úvod
V průběhu několika posledních let je možno pozorovat častější výskyt hydrologických extrémů. Dochází k častějšímu výskytu povodní a k prohlubování období sucha. Odborné práce z oblasti klimatologie na výskyt těchto extrémních událostí dlouhodobě upozorňují. Za zmínku stojí například roky 2011 a 2012, které z hydrologického hlediska byly hodnoceny jako extrémně suché [1], a rovněž tak i minulý rok 2015 [2]. V blízké budoucnosti je možno očekávat, že se tyto události budou vyskytovat častěji a jejich negativní účinek bude mít progresivní trend.
Klimatické podmínky již přinutily širokou odbornou veřejnost k zamyšlení, zda je Česká republika dostatečně připravena na vznik možných problémů způsobených nedostatkem zásob vody. Z podnětů odborné veřejnosti došlo k vytvoření pracovní skupiny SUCHO. Skupina vznikla na přelomu let 2013/2014 a formulovala výčet opatření proti negativním dopadům potenciálního sucha vedoucí k předejití krizové situace vyvolané jeho výskytem a následným nedostatkem vody. Po spojení s již existující pracovní skupinou VODA došlo ke vzniku Mezirezortní komise VODA‑SUCHO a po vzájemné spolupráci byl zpracován dokument [3]. Vytvořený dokument obsahuje obecný úvod do problematiky sucha včetně předkládací zprávy, zdůvodňující jeho potřebnost, a dále výčet přibližně padesáti konkrétních opatření proti negativním dopadům sucha. Koncepce popsaná v dokumentu byla 29. 7. 2015 usnesením vlády České republiky schválena.
Reálně je možné, že v případě po sobě se opakujícího výskytu několika déletrvajících období sucha může dojít k ohrožení zásobní funkce některých vodních zdrojů. Za předpokladu, že se tato hrozba stane skutečností a zásoba vody ve vodních nádržích nebude pro jejich provoz dostačující, bude možné řešení spočívat ve změně v provozování vodních děl. Tyto změny budou převážně představovat úpravu způsobu manipulace s řízeným odtokem. V krajním případě, pokud budou vyčerpány všechny možnosti ostatních adaptačních opatření k zajištění vodohospodářských služeb a kdy dopady klimatické změny nebudou řešitelné jinými prostředky pro jejich neproveditelnost nebo pro jejich neúměrné náklady, bude možno stávající nádrže rozšířit o nádrže nové. S touto myšlenkou byl v roce 2011 aktualizován generel území chráněných pro akumulaci povrchových vod [4]. Možností zmírnění dopadů změny klimatu využitím území chráněných pro akumulaci povrchových vod se rovněž věnuje práce, viz [5].
Od 70. let 20. století téměř nedošlo v oblasti strategického řízení (horizont řízení v časovém kroku měsíc) zásobní a hydroenergetické funkce u vodních nádrží k žádné významné změně. Postupně budeme zcela jistě svědky zesílení společenské poptávky nejen ve smyslu zdokonalování operativního řízení, ale rovněž ve smyslu změn základních strategických parametrů nádrží často s cílem významného posílení jejich zásobní funkce [6].
Současný stav řízení zásobní funkce je dostačující, ale vzhledem ke klimatickému vývoji může být v blízké době nepostačující. Klasické řízení zásobní funkce vodních nádrží vychází převážně z pravidel řízení [7], resp. z dispečerských grafů [8]. Vytváření uvedených pravidel bylo přímo ovlivněno výkonností tehdejší výpočetní techniky, což mělo za následek jejich značné zjednodušení. Pravidla jsou vytvořena na základě historických průtokových řad. Použití historických průtokových řad pravidlům neumožňuje adaptivně reagovat na aktuální hydrologické podmínky. Z tohoto důvodu můžou současná pravidla řízení narážet na omezení plynoucí z měnících se hydrologických podmínek, které v historických průtokových řadách nemůžou být zahrnuty. Dnešní výkonnost výpočetní techniky umožňuje používané způsoby řízení rozšířit o nové tzv. inteligentní způsoby řízení. Inteligentní řízení umožní vhodnou manipulaci na vodních dílech. Vhodná manipulace dokáže předejít poruchám systému v podobě nedodávky vody a také dokáže efektivně hospodařit s vodou pro hydroenergetické účely. V konečném důsledku úprava manipulace na vodních dílech může přinést podnikům povodí a ostatním společnostem výrazné ekonomické výhody v podobě hospodárné distribuce vody do systému a minimalizace možného vzniku ekonomických ztrát.
Běžně používaný způsob řízení by mohl být rozšířen o inteligentní způsob řízení. Inteligentní způsob řízení vychází z principu adaptivity. Adaptivní přístup umožňuje reagovat na průběžně se měnící hydrologické podmínky. Obvykle je k tomuto řízení potřebná znalost hydrologických předpovědí přítoků vody do nádrží v kombinaci s optimalizačním modelem. V praxi je možno principem adaptivity částečně eliminovat nepřesnost předpovědi. Adaptivním řízením nádrží a vodohospodářských soustav se zabýval na přelomu 80. a 90. let profesor Nacházel a docent Patera [9–12].
Inteligentní způsob řízení by v budoucnu mohl být použit jako podpůrný nástroj pro vodohospodářský dispečink, kterému zejména při řízení složitějších systémů s více nádržemi a s uvažováním více vodohospodářských účelů poskytne vhodnou podporu při procesu rozhodování. Uvažovaný algoritmus řízení bude představovat jedno z možných opatření pro zmírnění negativních dopadů sucha a nedostatku vody. Takové řízení zcela zapadá do koncepce popsané v dokumentu [3] a je součástí organizačního a provozního opatření.
Úspěšnost inteligentního řízení zásobní funkce a hydroenergetické funkce nádrže a soustavy nádrží byla již dříve prokázána, bylo dosaženo zajímavých výsledků a tyto výsledky je možné vidět například v [13–15]. Předložený článek si klade za cíl ověřit vliv polohy nádrže v povodí při inteligentním (adaptivním) řízení zásobní funkce nádrže. Je možno předpokládat, že výsledky z adaptivního řízení budou pro nádrže situované v různých částech povodí jiné. Za tímto účelem je řízení provedeno zvlášť pro nádrž, která je umístěna v horní části vodního toku, a následně pro nádrž, která je umístěna v dolní části vodního toku.
Použité metody
Předpovědní model
Pro vytvoření předpovědi průměrných měsíčních průtoků byl použit zonální pravděpodobnostní předpovědní model (ZPPM). Princip modelu je popsán v následujících odstavcích. Z několikaleté historické průtokové řady průměrných měsíčních průtoků jsou vyčleněny jednotlivé roky y = 1, 2…, Y, kde Y značí celkový počet let. Ze všech roků jsou následně vyčleněny i jednotlivé měsíce m = 1, 2…, 12 s průměrnými měsíčními průtoky Qm pro každý rok množiny y. Tímto způsobem je vytvořena množina, která je tvořena průměrnými měsíčními přítoky vody do nádrže za celé sledované období Y pro jednotlivé měsíce m. V každém měsíci je potom nalezena minimální hodnota minQm a maximální hodnota maxQm historického přítoku vody. Interval mezi hodnotami <minQm , maxQm> je rozdělen na předem zvolený počet zón. Počet zón Z je v každém měsíci stejný, velikost intervalu <minQzm , maxQzm> se však může lišit. Velikost jednotlivé zóny je stanovena tak, aby splňovala požadavek, že každá zóna musí obsahovat přibližně stejný počet prvků qm,y. Jednotlivé prvky qm,y každé množiny tvoří v příslušné zóně podmnožinu Qzm.
Podle počáteční průměrné hodnoty přítoku vody Qcm v měsíci m, ve kterém je rozhodováno o řízení, je vybrána zóna z, pro kterou platí Qcm ∈ <minQzm , maxQzm>. Zónou z prochází vybraný soubor historických řad s = 1, 2…, S, kde S je celkový počet řad procházející zónou. Pro každou řadu v souboru S platí, že qm,s ∈ Qzm. Další členy historických řad s souboru S, které jsou reprezentovány průměrnými měsíčními přítoky qm+t,s v měsících m + t, kde t je pořadí měsíce předpovědi, jsou pak použity pro určení intervalu zóny předpovědi zp. Pro t platí t = 1, 2…, TP, kde TP je počet předpovídaných kroků (měsíců) a qm+t,s ∈ Qzpm+t. Pro pořadí měsíců m + t > 12 platí m + t – 12. Pro každý měsíc předpovědi m + t je stanovena pouze jedna zóna předpovědi zp [10].
Hodnota průměrného měsíčního přítoku vody do nádrže Qpm+t v měsíci i m + t je rovna hodnotě vyskytující se v intervalu zóny předpovědi zp s největší pravděpodobností. Průměrné měsíční průtoky jsou potom předpovězeny podle následujícího principu. Pro všechny prvky qm+t,s z množiny je vytvořena hustota rozdělení pravděpodobnosti. Tvar spojité funkce je pro zjednodušení trojúhelníkový. Spodní hrana je tvořena intervalem <min, max> a vrchol trojúhelníku leží na předpokládané poloze modu Mod veličiny qm+t,s. K určení polohy modu je použit předpoklad, že platí:
Postup nalezení polohy modu na intervalu <min, max> je vyobrazen graficky na obr. 1.
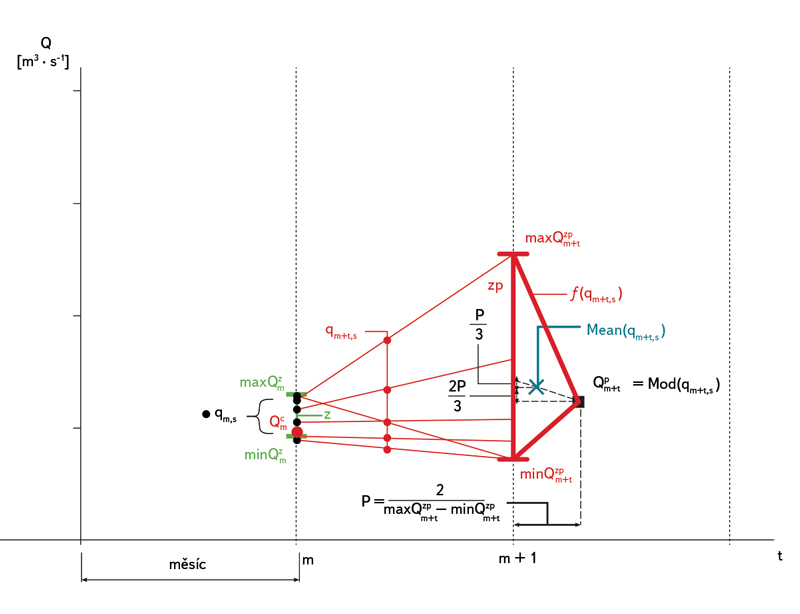
Obr. 1. Postup nalezení modu
Fig. 1. Procedure to find modus
Potom pro předpovězenou hodnotu přítoku vody do nádrže v měsíci m + t platí:
Algoritmus vytváření předpovědí Qpm + t pro více kroků (měsíců) je zobrazen na obr. 2.
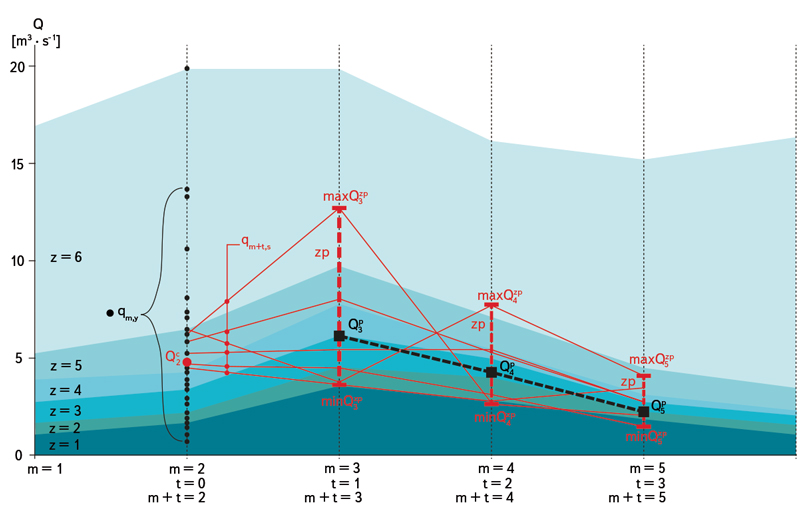
Obr. 2. Algoritmus vytváření předpovědi
Fig. 2. Algorithm of making prediction
Algoritmus adaptivního řízení zásobní funkce
Adaptivní řízení zásobní funkce nádrže je založeno na klasickém simulačním modelu (globální model). U simulačního modelu jsou pravidla řízení nahrazena opakovanou optimalizací (lokální model). Krok simulačního modelu je T = 1, 2,…, M, kde M je celkový počet kroků (měsíců). Algoritmus řízení je možno popsat ve třech krocích, které se postupně opakují.
V prvním kroku je vytvořena předpověď průměrných měsíčních přítoků vody do nádrže. K vytvoření předpovědi je použit ZPPM a délka předpovědi odpovídá zvolenému počtu předpovídaných měsíců.
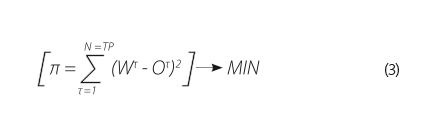
Ve druhém kroku je sestaven optimalizační model nádrže. Průměrné měsíční odtoky z nádrže Oτ na řízeném období jsou hledány optimalizací v každém časovém kroku lokálního modelu τ = 1, 2,……, N, kde N je celkový počet kroků. K nalezení Oτ je použita metoda diferenciální evoluce. Počet předpovídaných měsíců TP je roven počtu časových kroků N. Okrajovými podmínkami jsou předpovězené přítoky do nádrže. Počáteční podmínka řešení je objem vody v nádrži na konci časového kroku τ = 0. Ve skutečnosti by se jednalo o naměřenou hodnotu objemu vody v nádrži. Jako kritérium optimalizace byl zvolen součet čtverců odchylek mezi řídicím odtokem Wτ a skutečným řízeným odtokem Oτ vody z nádrže, který je snaha minimalizovat. Kriteriální funkce (3) je ve tvaru, který zajišťuje rovnoměrné rozložení nedodávky vody mezi jednotlivé měsíce. Použití druhé mocniny ve funkci (3) je dáno předpokladem, že větší množství nedodané vody je hůře přijatelné než menší množství nedodané vody.
Ve třetím kroku se na základě skutečného přítoku a nalezeného řízeného odtoku, který odpovídá prvnímu kroku lokálního modelu τ = 1, provede v časovém kroku T simulace chování nádrže pomocí simulačního modelu. Počáteční podmínkou pro řešení další optimalizace je výsledná velikost objemu vody v nádrži na konci časového kroku. Následně je optimalizace posunuta o jeden časový krok.
Kroky 1 až 3 se následně opakují pro každý krok globálního modelu T. Opakováním jednotlivých kroků se zároveň model adaptuje na nové podmínky. Celý proces adaptace je ukončen při dosažení časového kroku T = M.
K adaptivnímu řízení zásobní funkce nádrže byl použit program SOMVS (Simulační a optimalizační model vodohospodářské soustavy) [16]. Ve zkrácené formě byl software publikován například v impaktovaném časopise [17] a v České republice [18]. SOMVS je licencovaný software Vysokého učení technického v Brně. Obecně je možno software použít pro strategické plánování (rozvoj, řízení) v oblasti zásobní funkce vodních nádrží. Software umožňuje najít optimální řešení problémů spojených se zásobováním obyvatelstva, průmyslu, energetiky a zemědělství vodou.
Aplikace
Pro aplikaci byly vybrány dva měrné profily, profil Vlaské a profil Kroměříž. Oba měrné profily leží na řece Moravě. Profil Vlaské se nachází v horní části povodí řeky Moravy a profil Kroměříž je v dolní části povodí řeky Moravy. Profily byly vybrány s cílem provést adaptivní řízení zásobní funkce v profilech s rozdílnou vodností – viz Qa v tabulce 1.
Na začátku bylo provedeno vodohospodářské řešení zásobní funkce nádrže. Byly stanoveny nutné velikosti zásobních objemů Vz pro dvě fiktivní nádrže. První nádrž je situovaná v profilu Vlaské a druhá v profilu Kroměříž. Zásobní objemy byly stanoveny na základě známé hodnoty nalepšeného odtoku OP a za předpokladu dodržení stoprocentní zabezpečenosti odtoku vody z nádrže. Hodnota nalepšeného odtoku byla zvolena jako 0,3 (součinitel nalepšení α) násobek dlouhodobého průměrného průtoku Qa. Výsledné hodnoty zásobních objemů fiktivních nádrží jsou spolu s ostatními hodnotami uvedeny v tabulce 1.
Následně bylo provedeno adaptivní řízení zásobní funkce fiktivních nádrží v období let 2000 až 2006. Období let 1950 až 2000 bylo použito pro kalibraci, tzn. pro vytvoření ZPPM. Adaptivní řízení bylo provedeno pro 7 různých hodnot řídicího (nalepšeného) odtoku – konkrétně se jednalo o násobky součinitele nalepšení α (0,4; 0,5; 0,6; 0,7; 0,75; 0,8 a 0,9) a odpovídající hodnoty Qa. Pro každou hodnotu řídicího odtoku proběhlo celkem 24 výpočtů, dvanáct pro řízení s předpovězenými průtoky (adaptivní řízení s předpovězenými průtoky – AŘ – P) a dvanáct pro řízení s reálnými průtoky (adaptivní řízení s reálnými průtoky – AŘ – R). Jednotlivé výpočty se od sebe lišily počtem časových kroků lokálního modelu. Výpočty s reálnými průtoky sloužily pro porovnání úspěšnosti řízení, jelikož je považujeme za ideální stav – v praxi nedosažitelný. Dále bylo provedeno řízení pro každou hodnotu řídicího odtoku pomocí prosté simulace (simulační model – SM). U simulačního modelu probíhá řešení odlišným způsobem, než je tomu u optimalizačního modelu. Omezující podmínky jsou řešeny postupně po jednotlivých časových krocích a v každém kroku je snahou, aby odtok vody z nádrže byl roven hodnotě řídicího (nalepšeného) odtoku. Simulační model považujeme za nejjednodušší způsob řízení a byl použit pro srovnání jednotlivých výsledků z řízení.
Úspěšnost uvažovaných způsobů řízení byla vyhodnocena pomocí kritéria K:

Pokud byl řízený odtok OT větší než řídicí odtok WT, tak kritérium v časovém kroku T bylo rovno nule (KT = 0). Pokud byl řízený odtok OT menší než řídicí odtok WT, bylo kritérium v časovém kroku T vyhodnoceno jako čtverec rozdílu mezi řídicím a řízeným odtokem vody z nádrže (KT = (WT – OT )2 ).
Tabulka 1. Hodnoty zásobních prostorů jednotlivých nádrží
Table 1. Values of storage capacity of each reservoir

Shrnutí výsledků
Z důvodu velkého množství řešených variant jsou v příspěvku prezentovány jen ty varianty, které z pohledu přehledného shrnutí mají stěžejní význam. Při řízení zásobní funkce fiktivní nádrže v dolním profilu Kroměříž je dosaženo vypovídajících výsledků při řízení na řídicí odtok odpovídající součiniteli nalepšení α = 0,7. Při řízení s délkou předpovědi na jeden nebo na dva měsíce dopředu dosahuje řízení SM lepších hodnot kritéria než AŘ – P nebo AŘ – R. Při AŘ – P a AŘ – R na více než dva časové kroky dopředu dosahuje adaptivní řízení lepších hodnot kritéria než při řízení SM. Průběhy kritérií u uvažovaných způsobů řízení pro rozdílné délky předpovědí (počet časových kroků lokálního modelu) jsou zobrazeny na obr. 3.
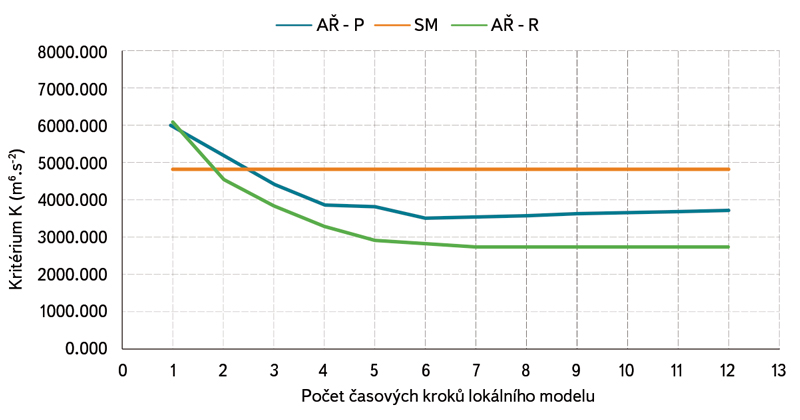
Obr. 3. Dolní profil Kroměříž – řízení na α = 0,7
Fig. 3. Lower profile Kroměříž – control of outflow on the α = 0.7
Výše uvedené skutečnosti platí téměř pro všechny uvažované hodnoty řídicích odtoků. Výjimku tvoří pouze řízení na řídicí odtok odpovídající hodnotě součinitele nalepšení α = 0,75, kde již i v případě délky předpovědi na jeden a dva měsíce dopředu dojde u AŘ – P a AŘ – R k lepším výsledkům, než je tomu u SM.
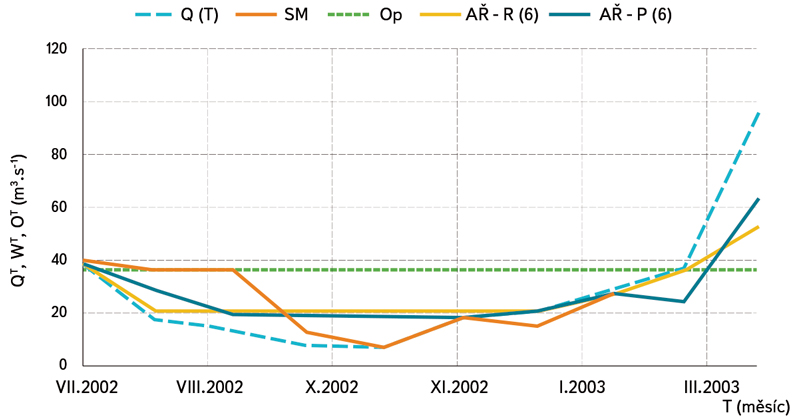
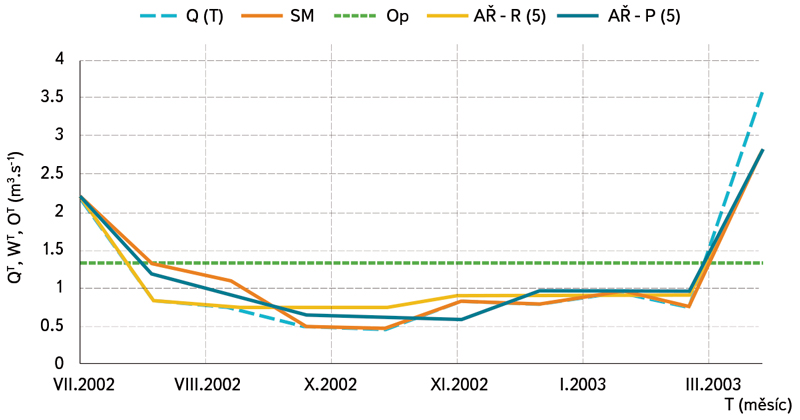
Na obr. 4 jsou znázorněny průběhy uvažovaných řízení na řídicí odtok odpovídající součiniteli nalepšení α = 0,7 a pro profil Kroměříž. Z důvodu přehlednosti a snadnější orientace v grafu je vybrána pouze část časového období, ve které vznikla při řízení porucha. V případě řízení SM je možno na obr. 4 vidět, že dosahuje nejhlubší poruchy při vzájemném srovnání s oběma variantami adaptivního řízení. Oba případy adaptivních řízení používají délku předpovědi na šest měsíců dopředu. Délka předpovědi šest měsíců je zvolena na základě toho, že od této délky došlo k ustálení hodnoty kritéria K, kritérium se již s rostoucím počtem měsíců předpovědi (kroků lokálního modelu) významně neměnilo. Tato skutečnost je patrná z uvedeného obr. 3. V obou případech adaptivního řízení můžeme vidět, že dosahují lepších výsledků řízení, protože hloubka poruchy není tak velká jako u SM. AŘ – R zde dosahuje mírně lepších výsledků než AŘ – P.
Obr. 4. Vybraný průběh řízení v profilu Kroměříž
Fig. 4. Selected process of outflow control in profile Kroměříž
Při řízení zásobní funkce fiktivní nádrže v horním profilu Vlaské bylo dosaženo shodných výsledků jako u nádrže umístěné v dolním profilu Kroměříž. Výjimku tvoří pouze řízení na hodnotu součinitele nalepšení α = 0,4 a α = 0,5. Rozdíl spočívá v tom, že AŘ – P zde nedosahuje nikdy lepších výsledků než řízení SM. Důvod je především v minimálním výskytu poruchových měsíců, kdy není dostatek vody, a v nepřesnosti předpovědního modelu, která se výrazněji projeví u nižších průtoků. Obdobným způsobem jako pro dolní profil Kroměříž jsou na obr. 5 a 6 zobrazeny výsledky pro horní profil Vlaské.
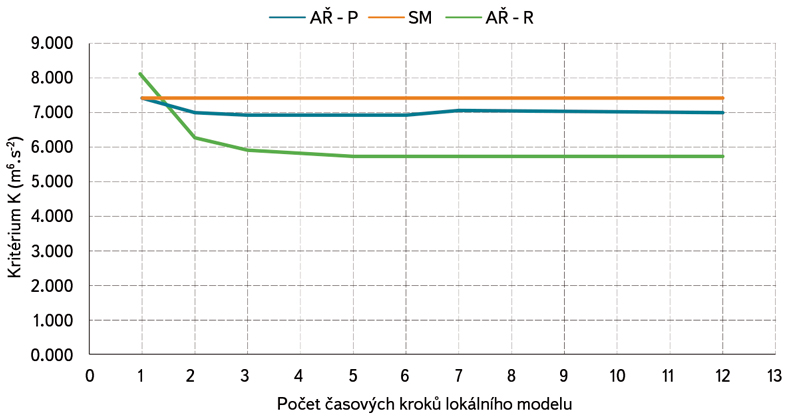
Obr. 5. Dolní profil Vlaské – řízení na α = 0,7
Fig. 5. Higher profile Vlaské – control of outflow on the α = 0.7
Obr. 6. Vybraný průběh řízení v profilu Vlaské
Fig. 6. Selected process of outflow control in profile Vlaské
Závěr
Článek si kladl za cíl ověřit vliv polohy nádrže v povodí při inteligentním (adaptivním) řízení zásobní funkce nádrže. Na základě dosažených výsledků je možno konstatovat, že z pohledu počtu předpovídaných měsíců (počtu časových kroků lokálního modelu) je dosaženo v obou profilech podobných výsledků. U předpovědi na jeden až dva měsíce jsou výsledky ve většině případů horší než u řízení SM. S přírůstkem předpovídaných měsíců dojde k postupnému klesání kritéria. K ustálení kritéria dojde při řízení s předpovědí na 5 až 6 měsíců a následně se hodnota kritéria již nemění nebo se mění jen velmi málo.
Adaptivní řízení dosahovala nejlepších výsledků při vyšších hodnotách řízeného odtoku. Samozřejmě není možné nádrž, která je navržena na 0,3násobek dlouhodobého průměrného průtoku, řídit na řídicí odtok, který odpovídá 0,7násobku dlouhodobého průměrného průtoku. Ovšem v důsledku klimatických změň, při kterých lze v průběhu hydrologického roku očekávat výskyt dlouhotrvajících období sucha střídajících se s obdobím přívalových dešťů, můžeme očekávat výrazný pokles dlouhodobého průměrného průtoku. Podle výsledků uvedených v [19] hodnota dlouhodobého průměrného průtoku v našich tocích může klesnout o 20 až 40 %.
Při řízení zásobní funkce nádrže se pokles dlouhodobého průměrného průtoku, při zachování stávajících požadavků na odběr vody (řídicí odtok), projeví tím, že dojde ke zvýšení hodnoty součinitele nalepšení α. Při uvažování pesimistického scénáře, uvažujícího s poklesem dlouhodobého průměrného průtoku o 40 %, by hodnota součinitele nalepšení, při zachování stávajícího požadavku na odběr vody, vzrostla z hodnoty α = 0,3 na hodnotu α = 0,5. V případě, že by došlo i ke zvýšení požadavku na odběr vody, tak se může součinitel nalepšení přiblížit hodnotě α = 0,6. Při řízení na řídicí odtok odpovídající součiniteli nalepšení α = 0,6 dosahuje adaptivní řízení zásobní funkce nádrže dobrých výsledků u obou profilů.
Dosažené výsledky poukazují na možnost budoucího praktického použití adaptivního řízení u nádrží situovaných v horní a i v dolní části povodí. Uvedený adaptivní způsob řízení zásobní funkce by mohl být prostředkem, kterým by bylo možno v budoucnu zefektivnit způsob hospodaření s vodou v nádržích. Obecně můžou inteligentní způsoby řízení představovat podpůrný nástroj pro vodohospodářský dispečink, kterému zejména při řízení složitějších systémů s více nádržemi a s uvažováním více účelů poskytnou vhodnou podporu při procesu rozhodování.
Poděkování
Článek je výsledkem specifického výzkumu FAST‑S-16-3444 Návrh hybridní metody pro řízení zásobní funkce nádrže.
